|
I am a Research Scientist at Google DeepMind in San Francisco, USA, where I teach Gemini and Nano Banana multimodal understanding and generation. I received my PhD from ETH Zurich and Max Planck Institute for Intelligent Systems under the supervision of Marc Pollefeys and Andreas Geiger. After the PhD, I worked as a Senior Researcher/Postdoc at ETH Zurich for 6 months. I was a research intern at Google Research with Tom Funkhouser, Meta Reality Labs Research with Michael Zollhoefer, Technical University of Munich with Daniel Cremers, and INRIA with Peter Sturm. I completed an Erasmus Mundus Masters in Computer Vision and Robotics (VIBOT) with distinction, and a Bachelors in Automation at Xi'an Jiaotong University. |

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Google DeepMind tech report | website |
 |
Jonas Kulhanek, Marie-Julie Rakotosaona, Fabian Manhardt, Christina Tsalicoglou, Michael Niemeyer, Torsten Sattler, Songyou Peng, Federico Tombari Conference on Neural Information Processing Systems (NeurIPS), 2025 (Spotlight, top 3%) paper | project page City-scale 3DGS in real-time with an iPhone. |
  |
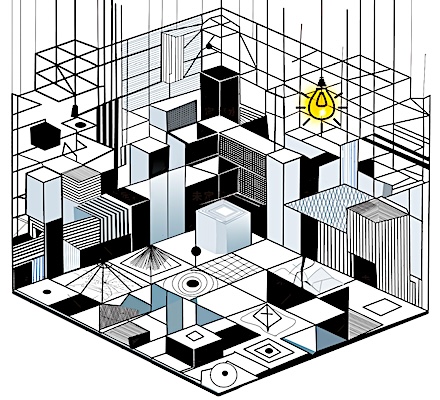
Boyang Deng, Songyou Peng*, Kyle Genova*, Gordon Wetzstein, Noah Snavely, Leonidas Guibas, Thomas Funkhouser International Conference on Computer Vision (ICCV), 2025 (Highlight, top 2.3%) paper | project page We help you find "unusual" things and trends in NYC and SF, like 200+ abstract sculptures, see left for an example. |
 |
Jan Ackermann, Jonas Kulhanek, Shengqu Cai, Haofei Xu, Marc Pollefeys, Gordon Wetzstein, Leonidas Guibas, Songyou Peng International Conference on Computer Vision (ICCV), 2025 paper | project page | code We give you great 3DGS even after you add, delete, change stuff in your room. |
 |
Anh Thai, Songyou Peng, Kyle Genova, Leonidas Guibas, Thomas Funkhouser International Conference on Computer Vision (ICCV), 2025 paper | project page 3D language Gaussian field benefits 3D VQA tasks. |
 |
Haofei Xu, Songyou Peng, Fangjinhua Wang, Hermann Blum, Daniel Barath, Andreas Geiger, Marc Pollefeys Conference on Computer Vision and Pattern Recognition (CVPR), 2025 paper | project page | code Depths helps 3DGS, 3DGS helps depth prediction. |
 |
Haotong Lin, Sida Peng, Jingxiao Chen, Songyou Peng Jiaming Sun, Minghuan Liu, Hujun Bao, Jiashi Feng, Xiaowei Zhou, Bingyi Kang Conference on Computer Vision and Pattern Recognition (CVPR), 2025 paper | project page | code 4K accurate metric depth estimation from low-res LiDAR. |
 |
Chong Bao, Zehao Yu, Jiale Shi, Guofeng Zhang, Songyou Peng, Zhaopeng Cui Conference on Computer Vision and Pattern Recognition (CVPR), 2025 paper | project page | video | code Video models enable unbounded 360° scene reconstruction from 3-4 unposed views. |
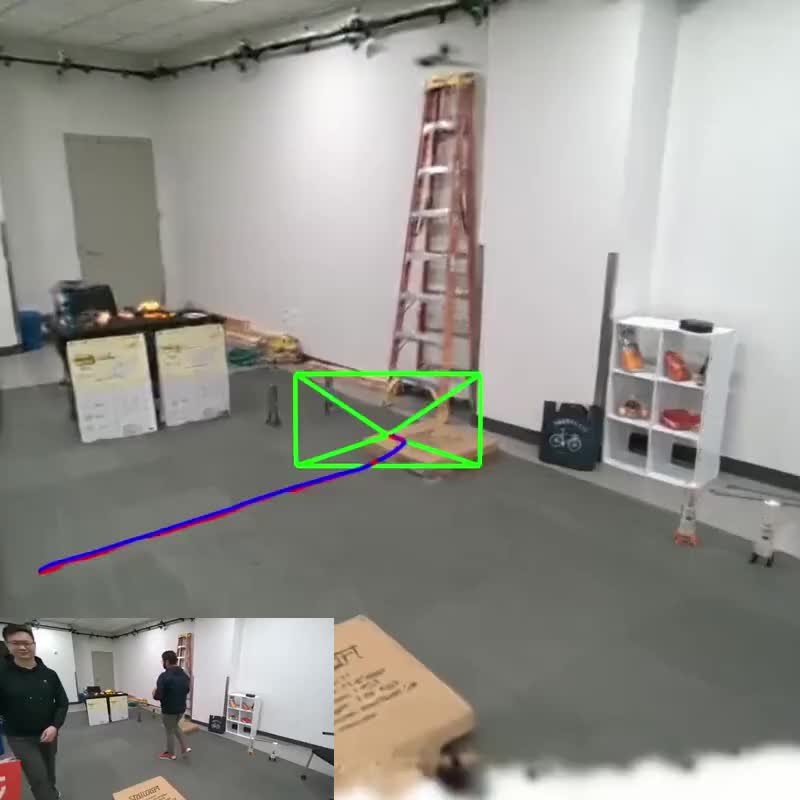 |
Jianhao Zheng*, Zihan Zhu, Valentin Bieri, Marc Pollefeys, Songyou Peng, Iro Armeni Conference on Computer Vision and Pattern Recognition (CVPR), 2025 paper | project page | code Robust SLAM for dynamic scenes in the wild. |
 |
Botao Ye, Sifei Liu, Haofei Xu, Xueting Li, Marc Pollefeys, Ming-Hsuan Yang, Songyou Peng International Conference on Learning Representations (ICLR), 2025 (Oral, top 1.8%) paper | project page | code Unposed 3DGS made easy, also enables SoTA relative pose estimation performance! |
 |
Jonas Kulhanek, Songyou Peng, Zuzana Kukelova, Marc Pollefeys, Torsten Sattler Conference on Neural Information Processing Systems (NeurIPS), 2024 paper | project page | code Boost 3DGS for in-the-wild scenes with appearance and dynamic changes. |
 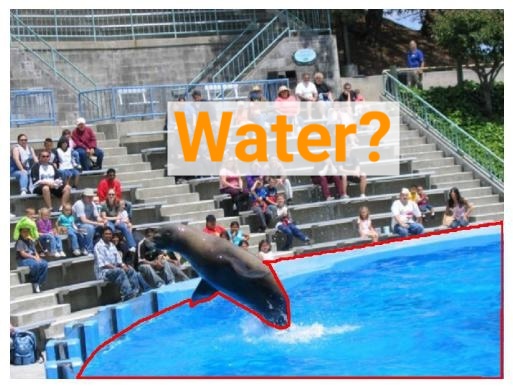 |
Haiwen Huang, Songyou Peng, Dan Zhang, Andreas Geiger Conference on Neural Information Processing Systems (NeurIPS), 2024 paper | project page | code Wanna enhance your segmentation model or benchmark? Renovate names now! |
  |
Rui Huang, Songyou Peng, Ayça Takmaz, Federico Tombari, Marc Pollefeys, Shiji Song, Gao Huang, Francis Engelmann European Conference on Computer Vision (ECCV), 2024 paper | project page | code | demo A self-supervised segmentation approach that outperforms fully-supervised methods. |
 |
Weining Ren*, Zihan Zhu*, Boyang Sun, Jiaqi Chen, Marc Pollefeys, Songyou Peng Conference on Computer Vision and Pattern Recognition (CVPR), 2024 (* equal contribution) paper | project page | video | code We enable robust novel view synthesis from casually captured in-the-wild images. Master thesis project. |
 |
Lei Li, Songyou Peng, Zehao Yu, Shaohui Liu, Rémi Pautrat, Xiaochuan Yin, Marc Pollefeys Conference on Computer Vision and Pattern Recognition (CVPR), 2024 paper | project page | video | code The straight line belongs to men, the curved one to God.-- Antonio Gaudi Master thesis project. |
|
|
Weiyang Liu*, Zeju Qiu*, Yao Feng**, Yuliang Xiu**, Yuxuan Xue**, Longhui Yu**, Haiwen Feng, Zhen Liu, Juyeon Heo, Songyou Peng, Yandong Wen, Michael J. Black, Adrian Weller, Bernhard Schölkopf (*/** equal contribution) International Conference on Learning Representations (ICLR), 2024 paper | project page | code | |

 |
Zihan Zhu*, Songyou Peng*, Viktor Larsson, Zhaopeng Cui, Martin R. Oswald, Andreas Geiger, Marc Pollefeys International Conference on 3D Vision (3DV), 2024 (Oral, Best Paper Honorable Mention) (* equal contribution) paper | project page | video | code RGB-only version of our NICE-SLAM, making it NICER. |
|
|
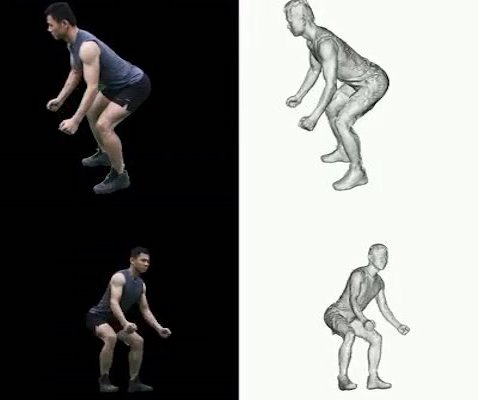
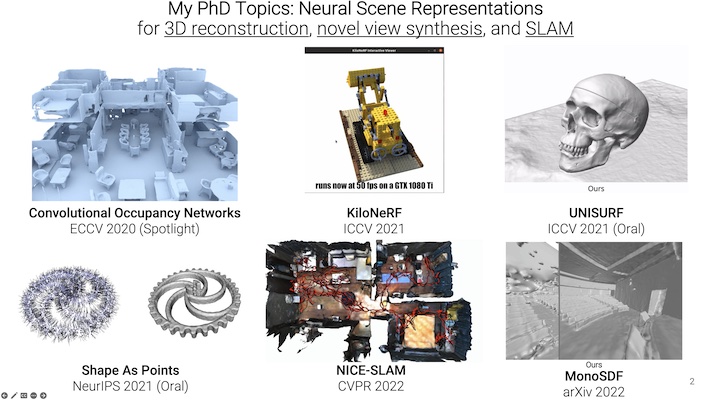
Lixiang Lin, Songyou Peng, Qijun Gan, Jianke Zhu International Conference on 3D Vision (3DV), 2024 (Spotlight, top 8.2%) paper | project page | code Shape As Points (SAP) for fast human body reconstruction. |
 |
Songyou Peng PhD Thesis, 2023 (ECVA PhD Award) thesis | slides PhD supervisors: Prof. Marc Pollefeys (ETH Zurich), Prof. Andreas Geiger (MPI-IS) External committee: Prof. Leonidas J. Guibas (Stanford), Prof. Vincent Sitzmann (MIT) |
|
|
Shengqu Cai, Eric R. Chan, Songyou Peng, Mohamad Shahbazi, Anton Obukhov, Luc Van Gool, Gordon Wetzstein International Conference on Computer Vision (ICCV), 2023 paper | project page A diffusion-model based unsupervised framework capable of synthesizing novel views depicting a long camera trajectory. |

 |
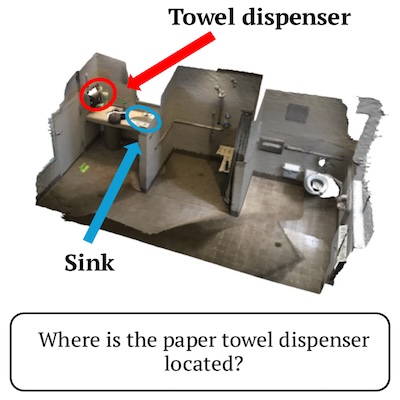
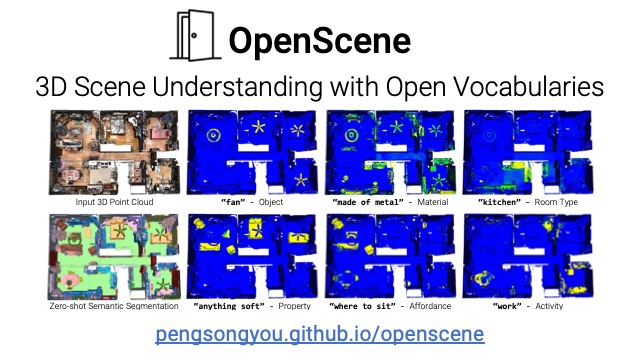
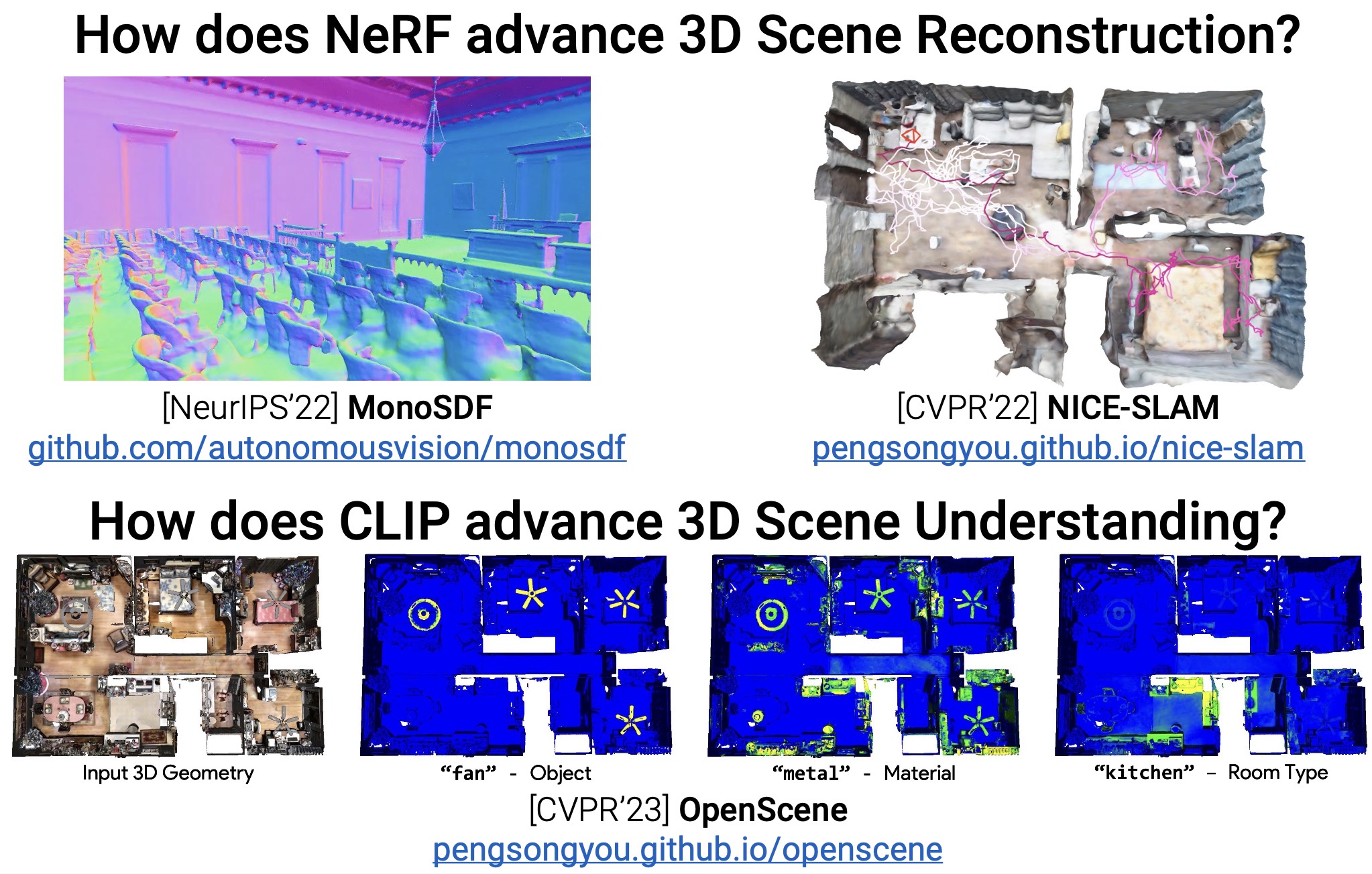
Songyou Peng, Kyle Genova, Chiyu "Max" Jiang, Andrea Tagliasacchi, Marc Pollefeys, Thomas Funkhouser Conference on Computer Vision and Pattern Recognition (CVPR), 2023 paper | project page | video | code Zero-shot approach for novel 3D scene understanding tasks with open-vocabulary queries. |
 |
Zehao Yu, Anpei Chen, Bozidar Antic, Songyou Peng, Apratim Bhattacharyya, Michael Niemeyer, Siyu Tang, Torsten Sattler, Andreas Geiger Open Source Project, 2023 project page | code We provide a unified framework and benchmark for neural implicit surface reconstruction. |
 |
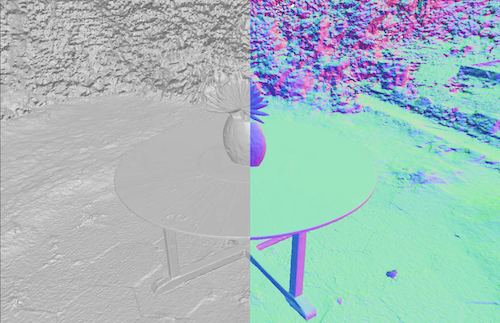
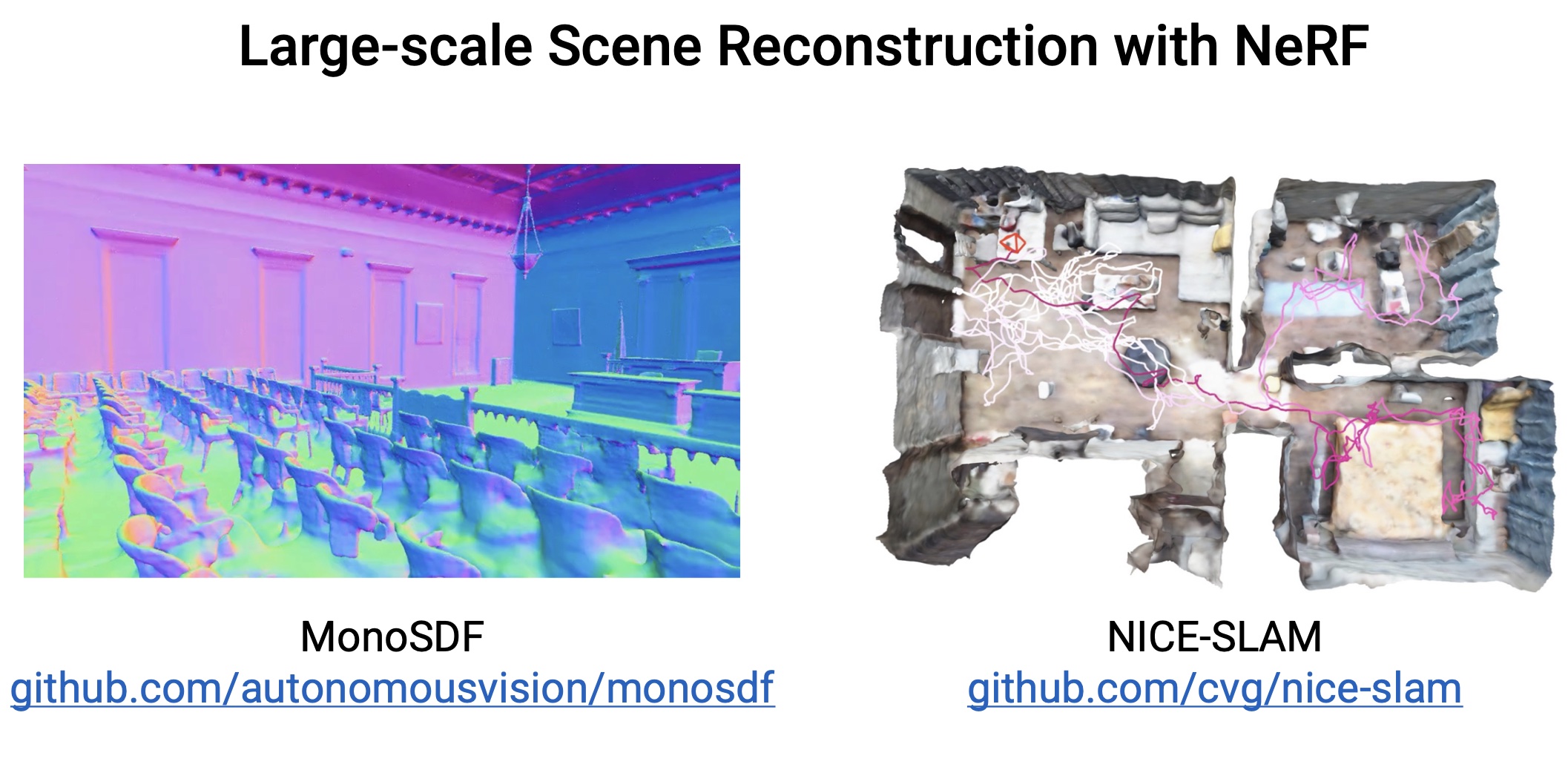
Zehao Yu, Songyou Peng, Michael Niemeyer, Torsten Sattler, Andreas Geiger Conference on Neural Information Processing Systems (NeurIPS), 2022 paper | project page Monocular depth and normal cues significantly boost the performance of neural implicit surface reconstruction methods. |
 |
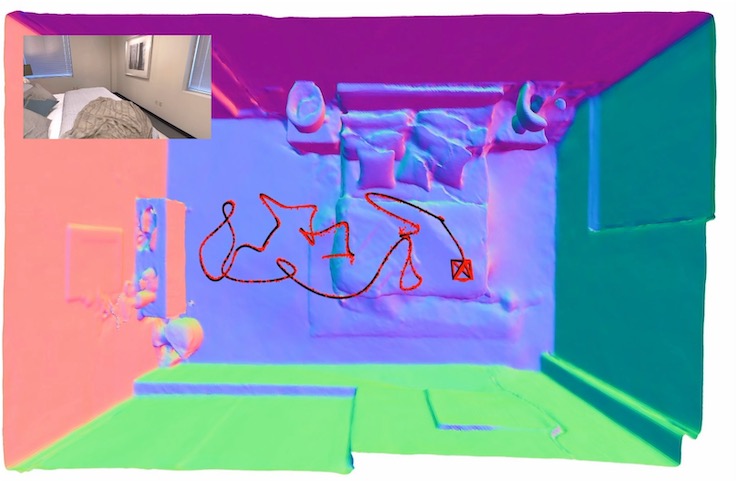
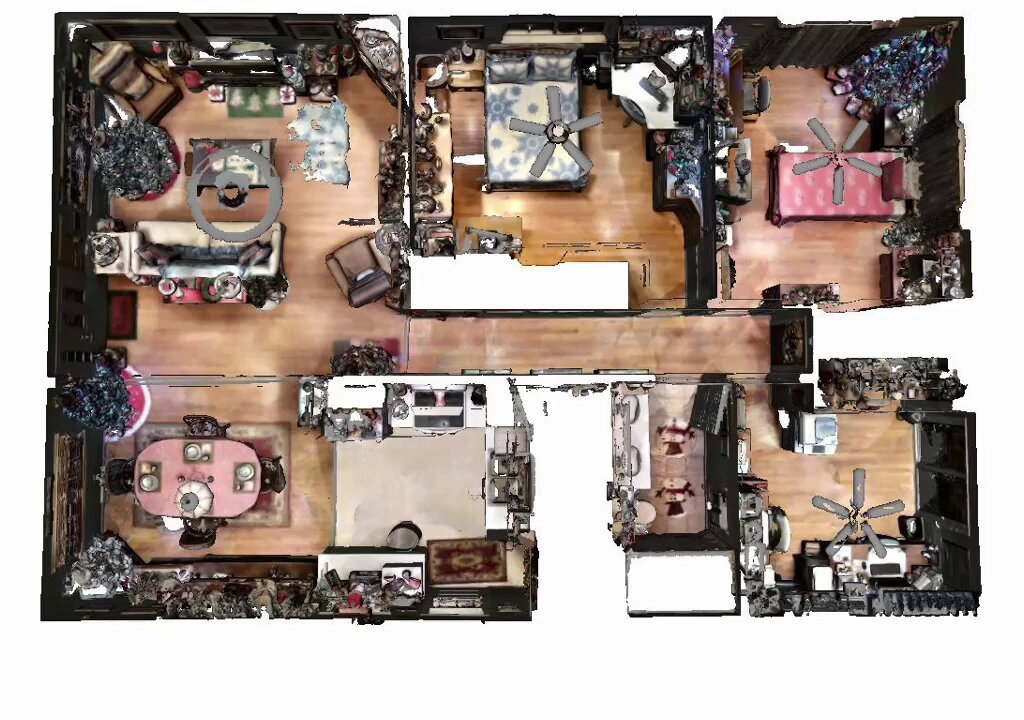
Zihan Zhu*, Songyou Peng*, Viktor Larsson, Weiwei Xu, Hujun Bao, Zhaopeng Cui, Martin R. Oswald, Marc Pollefeys Conference on Computer Vision and Pattern Recognition (CVPR), 2022 (* equal contribution) paper | project page | video | code A neural implicit-based RGB-D SLAM that can be applied to large-scale scenes. |
 |
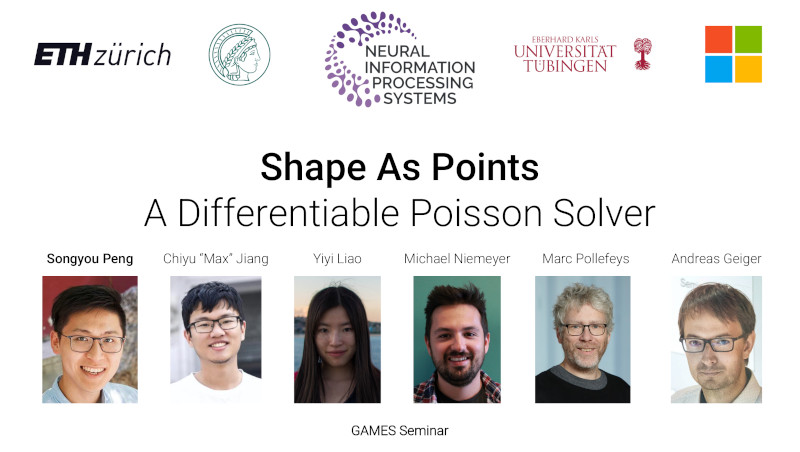
Songyou Peng, Chiyu "Max" Jiang, Yiyi Liao, Michael Niemeyer, Marc Pollefeys, Andreas Geiger Conference on Neural Information Processing Systems (NeurIPS), 2021 (Oral, top 0.6%) paper | project page | video (6 min) | video (12 min) | podcast | code An interpretable hybird shape representation that yields HQ watertight meshes at low inference times. |
  |
Michael Oechsle, Songyou Peng, Andreas Geiger International Conference on Computer Vision (ICCV), 2021 (Oral, top 3%) paper | project page | video | teaser video | code Our method enables to reconstruct accurate surfaces without input masks. |
 |
Christian Reiser, Songyou Peng, Yiyi Liao, Andreas Geiger International Conference on Computer Vision (ICCV), 2021 paper | project page | blog | video | teaser video | code Over 2000x speed-ups for NeRF are possible by utilizing thousands of tiny MLPs. |
 |
Stefan Lionar*, Daniil Emtsev*, Dusan Svilarkovic*, Songyou Peng Winter Conference on Applications of Computer Vision (WACV), 2021 (* equal contribution) paper | video | code A student project of 3D Vision course at ETH Zurich where I served as the advisor. |
  |
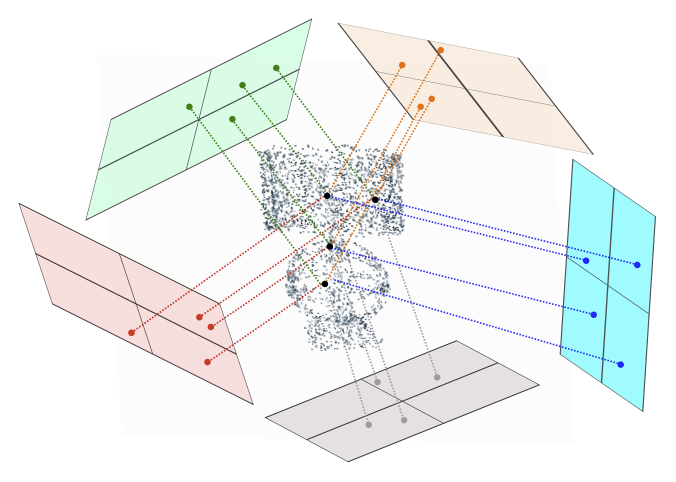
Songyou Peng, Michael Niemeyer, Lars Mescheder, Marc Pollefeys, Andreas Geiger European Conference on Computer Vision (ECCV), 2020 (Spotlight, top 5%) paper | project page | blog | video | teaser video | code Most influential ECCV'20 papers #13 A flexible implicit representation for accurate large-scale 3D reconstruction. |
  |
Shaohui Liu, Yinda Zhang, Songyou Peng, Boxin Shi, Marc Pollefeys, Zhaopeng Cui Conference on Computer Vision and Pattern Recognition (CVPR), 2020 paper | project page | teaser video | poster | code A differentiable renderer for deep implicit signed distance functions. |
 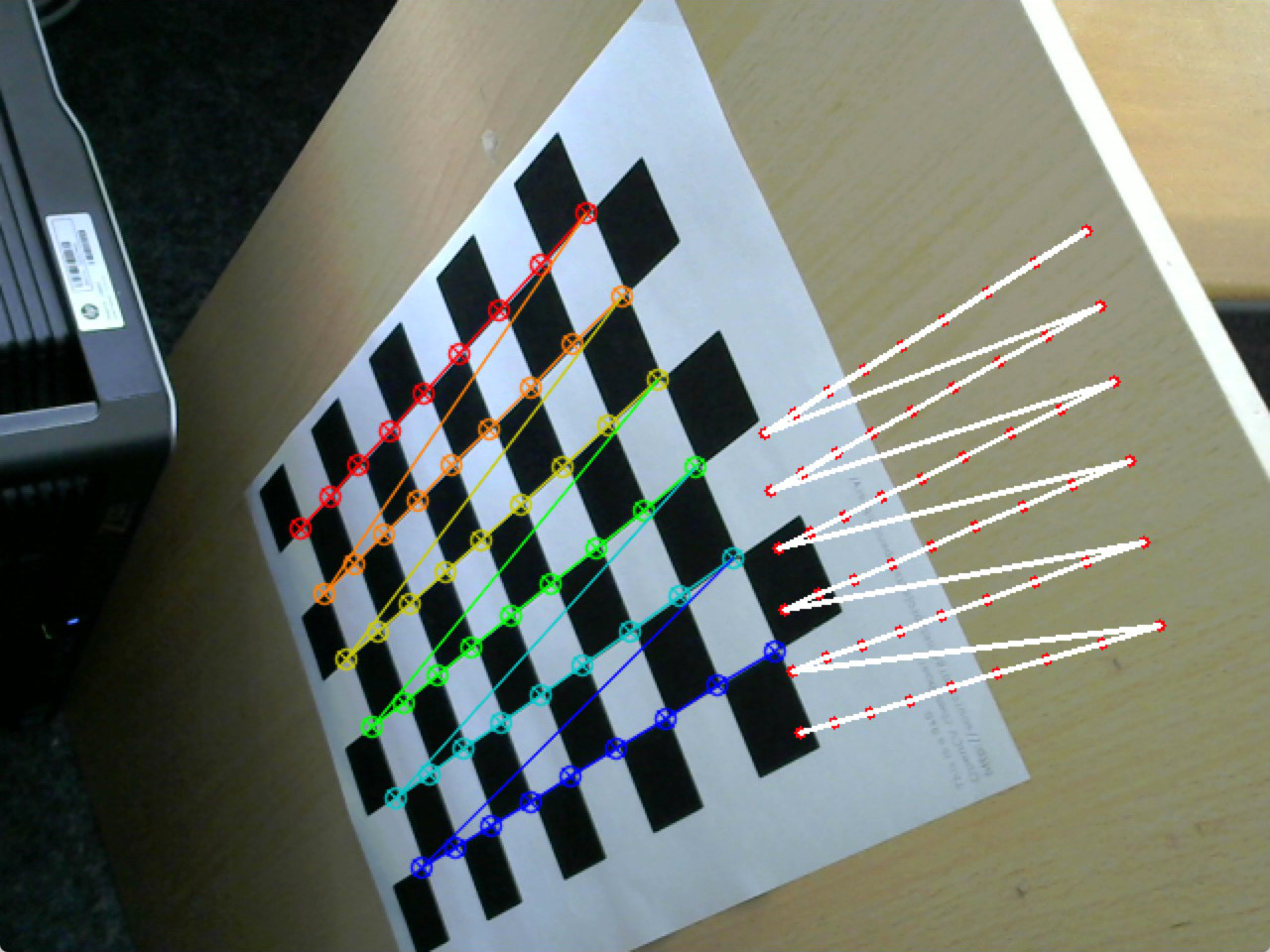 |
Songyou Peng and Peter Sturm International Conference on Computer Vision (ICCV), 2019 (Oral, top 4.6%) paper | video | poster | code A novel system that interactively guides a user to take optimal calibration images. |
  |
Bjoern Haefner*, Songyou Peng*, Alok Verma*, Yvain Queau, Daniel Cremers IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 2019 (* equal contribution) paper | project page Recover high-resolution depth maps with fine geometric details using photometric techniques. |
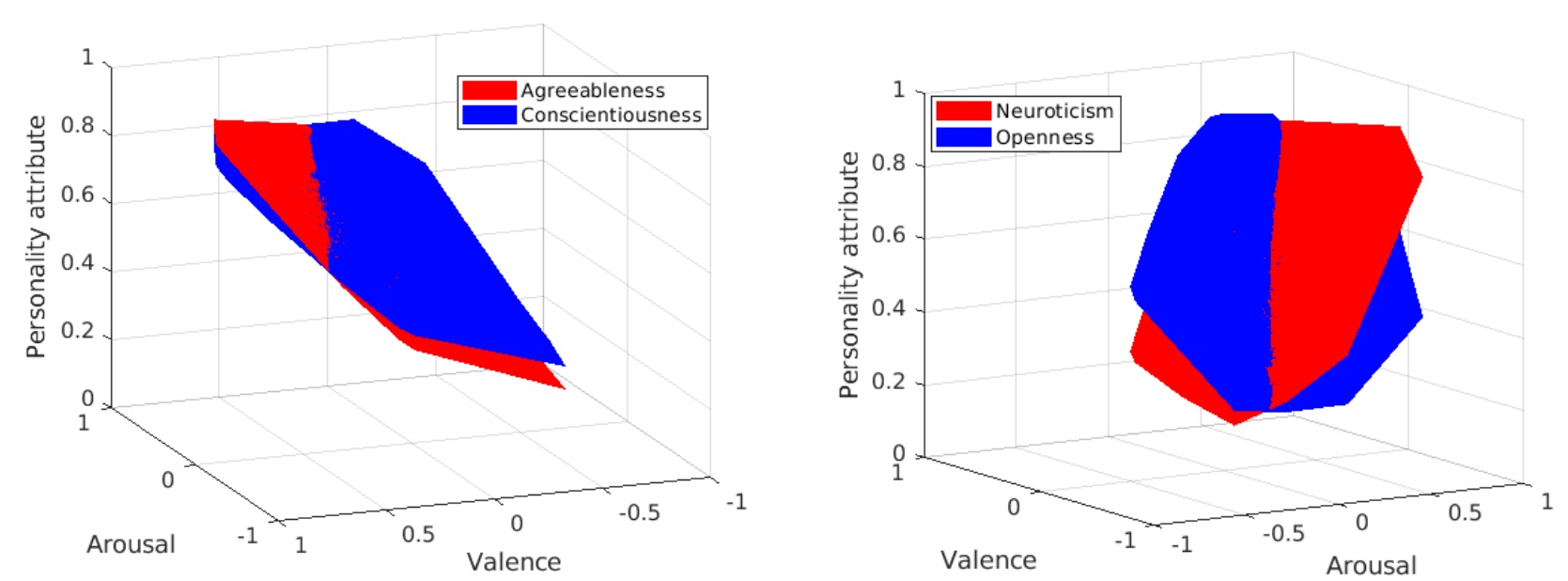 |
Le Zhang, Songyou Peng, Stefan Winkler IEEE Transactions on Affective Computing (TAFFC), 2019. In press. paper | code A journal extension of our ACM MM 2018 paper. |
 
|
Songyou Peng, Le Zhang, Stefan Winkler, Marianne Winslett ACM International Conference on Multimedia (ACM MM), 2018 paper | slides | code Technical Demo. A deep Siamese-like network is introduced to predict one's Big-Five personality and arousal-valence emotion from one portrait photo. |
  |
Songyou Peng, Bjoern Haefner, Yvain Queau, Daniel Cremers International Conference on Computer Vision (ICCV) Workshops, 2017 paper | slides | code & data A novel depth super-resolution approach for RGB-D sensors is presented. This paper a part of my master thesis, and subsumed by our TPAMI paper. |
|
|
I am fortunate to (co-)mentor some talented and highly motivated students and interns. I have learnt from and gotten inspired by them:
|

|
|
|
|
|
|
|
|

|
Lecturer, GAMES003: 图形视觉科研基本素养 (How To Do Research in CV/CG), Fall 2024
Together with Sida Peng, Jun Gao, and Qianqian Wang. |
|
|
Teaching Assistant (Lead), 3D Vision, Spring 2023
Teaching Assistant, Computer Vision, Fall 2022 Teaching Assistant (Lead), 3D Vision, Spring 2022 Teaching Assistant, Deep Learning for Computer Vision: Seminal Work, Spring 2022 Teaching Assistant, 3D Vision, Spring 2020 Teaching Assistant, Deep Learning for Computer Vision: Seminal Work, Spring 2020 |
|
|
Teaching Assistant, Deep Learning, Winter 2020/2021
|
|
|
template adapted from this awesome website |